Offshore & Onshore Structural Analysis & Design Software
Petroleum Structural Engineering® Software
API 4F (5th edition)
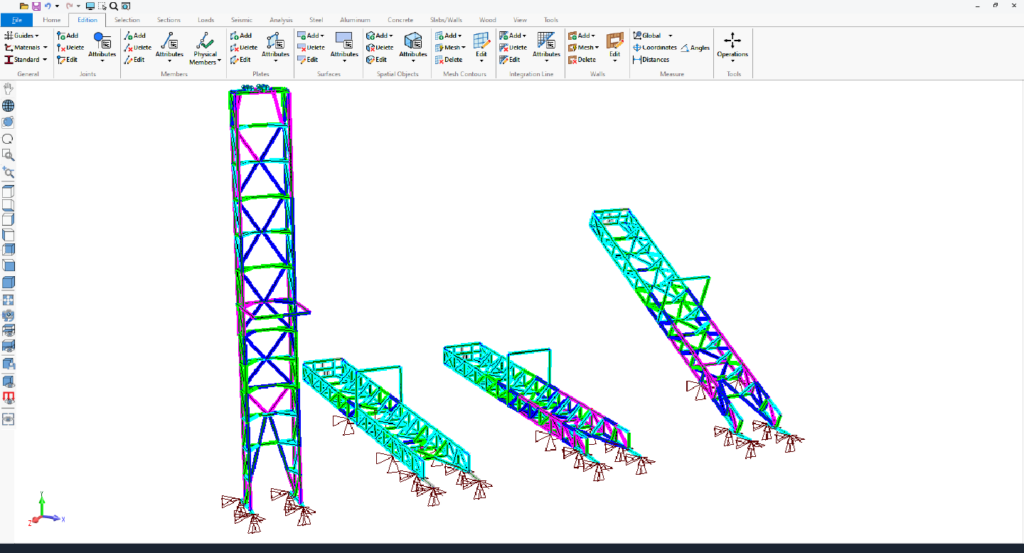
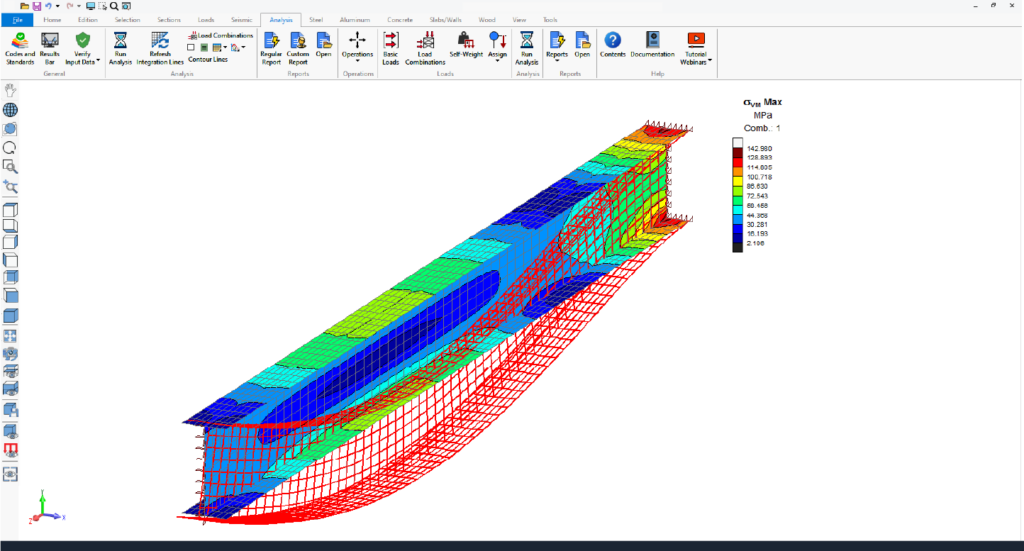
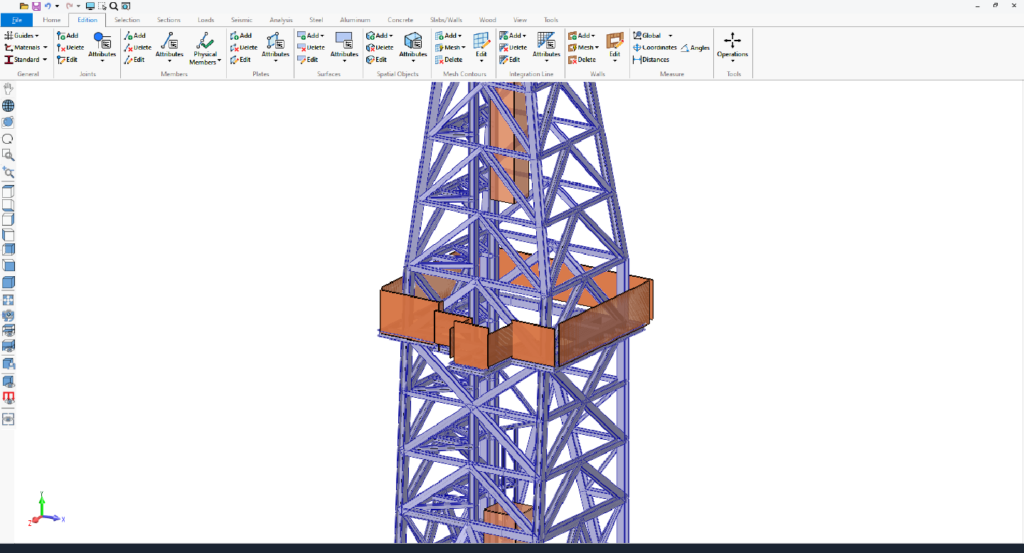
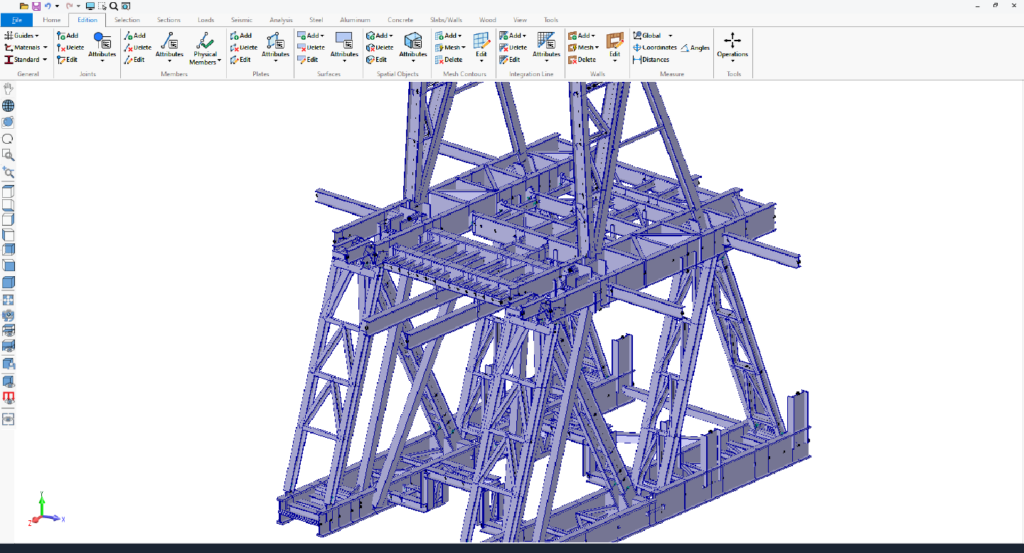
The Offshore and Onshore structural analysis and design software built for the oil & gas industry
Structural analysis and design software for oil & gas drilling structures, including platforms, rigs, masts, and substructures in compliance to the API 4F 5th edition requirements. Trusted by the world's leading engineering firms for over 40 years.